24 января, 2008
Первый автоматизированный локатор
Бурное развитие радиолокационной техники и зенитных ракетных комплексов перехвата после Второй мировой войны поставило боевую авиацию к середине 1950-х гг. в трудное положение. В системе ПВО появилась реальная возможность создания сплошного радиолокационного поля на средних и больших высотах. Вследствие этого авиацией было потеряно одно из основных боевых свойств - внезапность появления над целью. Создание зенитных ракетных комплексов, а также авиационных ракетных комплексов перехвата, оборудованных совершенными системами наведения ракет, открыло возможность поражения аэродинамических летательных аппаратов всех типов, летящих на средних и больших высотах практически с любой скоростью.
В связи с этим поиски путей повышения эффективности использования ударной авиации в условиях современной ПВО привели к созданию технических средств борьбы с радиолокацией (помехи, самонаводящиеся средства уничтожения РЛС) и к пересмотру тактики боевого применения различных родов авиации.
Одним из главных мероприятий, направленных на повышение эффективности средств авиационного нападения, было освоение боевых действий на малых и предельно малых высотах, где радиолокационное обнаружение затруднено из-за кривизны земной поверхности.
Все основные самолеты стратегической и тактической авиации вероятного противника были приспособлены для полетов на малых высотах. В связи с этим перед ПВО встала задача борьбы с целями, летящими на малых высотах.
Минимальные высоты полета в простых метеоусловиях при визуальной видимости земли по опыту учений и боевых действий тактической авиации США во Вьетнаме составляли в тот период 50-150 м. Над отдельными равнинными участками и над морем - до 15-25 м. В сложных метеоусловиях, над пересеченной местностью при наличии на самолете системы управления обеспечивающей "огибание" рельефа наименьшая высота могла достигать 100 м.
В то время стратегические бомбардировщики типа В-52 во время учений отрабатывали длительные полеты на высотах 100-300 м. Их скорость на этих высотах лежала в пределах 780-930 км/час. Самолеты В-58 и "Мираж-IV" на высотах 60-150 м могли летать с максимальной скоростью до 1200 км/час.
Тактические истребители того времени (типа F-104, F-105, F-4) на малых высотах могли кратковременно развивать скорость порядка 1350-1450 км/час. Максимальная скорость на малых высотах поступающих в 1960-х гг. на вооружение тактических истребителей F-111 достигала 1500 км/час.
Соответственно были приспособлены для полета на малых высотах и ракеты (снаряды, как их тогда называли) класса "воздух-земля". Минимальная высота применения ракет "Хаунд-Дог" (состоящих на вооружении самолетов В-52) составляли 500-600 м (при дальности полета 500-600 км и скорости 1200 км/час). Для снарядов "Блю-Стилл" (состоящих на вооружении самолетов серии "V") при высоте пуска 300 м дальность полета равнялась 160-250 км (при скорости до 1500 км/час). Разрабатываемые снаряды SRAM (для В-52, FВ-111) предназначались для преодоления системы ПВО преимущественно на малых высотах. Предполагалось, что при пуске и полете SRAM на высоте 150-300 м со скоростью 2500 км/час дальность будет достигать 80 км.
Для поражения целей на больших расстояниях разрабатывались снаряды SCAM. Ожидалось, что при использовании снаряда SCAM на высоте порядка 500 м дальность составит 1500 км (при скорости 1000 км/час).
Обстановка требовала от промышленности и Войск ПВО СССР на все эти шаги США дать адекватные ответы. В то время уже более десяти лет шло серийное производство первой массовой радиолокационной станции П-15 ("Тропа") для Войск ПВО страны и войсковой ПВО на Муромском и Ульяновском радиозаводах. Мобильная дециметровая РЛС П-15 являлась основной станцией для обнаружения низколетящих целей. В станции был реализован когерентно-импульсный метод борьбы с пассивными помехами (на данный метод Ю. Б. Кобзарев еще в 1945 г. получил авторское свидетельство).
Однако, несмотря на наличие на вооружении весьма неплохой РЛС П-15, проблема обнаружения маловысотных целей в связи с развитием авиации вероятного противника перед Войсками ПВО не снималась, а еще более усугублялась. Вопросы обеспечения эффективной борьбы с маловысотными целями рассматривались на Научно-техническом совете Военно-промышленной комиссии при Правительстве РФ 4 и 15 июня 1967 г. с повесткой "О развитии средств радиолокационного поля ПВО страны".
5 июня 1968 г. решением Комиссии Президиума Совета Министров СССР по военно-промышленным вопросам № 144 на Яузский радиотехнический институт (ныне Всероссийский научно-исследовательский институт радиотехники) была возложена разработка аванпроекта передвижной трехкоординатной радиолокационной станции СТ-68 на высотной опоре для обнаружения и сопровождения маловысотных целей, прикрытых активными и пассивными помехами.
Тактико-техническое задание на разработку аванпроекта было утверждено начальником 4-го Главного управления Минобороны (в/ч 77969) генерал-полковником авиации Байдуковым Георгием Филипповичем, прославленным летчиком, Героем Советского Союза (Золотая Звезда № 9) 11 сентября 1968 г.
В соответствии с основными тактико-техническими требованиями на разработку аванпроекта РЛС СТ-68 должна выполняться в двух вариантах - с минимальным расчетом для обслуживания и автоматическая (без обслуживания) и состоять из: радиолокационной аппаратуры, аппаратуры съема и передачи данных на радиолокационный узел, источников первичного питания, аппаратуры системы общегосударственного опознавания и сопряжения с запросчиками.

АПУ при подъеме
Фотоархив ВНИИРТ
По сравнению с разработанной Институтом РЛС П-15 к станции СТ-68 предъявлялись значительно более высокие тактико-технические требования. Кроме повышенной дальности обнаружения маловысотных целей, заданы очень высокие точности определения координат по азимуту, дальности и высоте в условиях применения активных и пассивных помех, мощных отражений от земли. В РЛС СТ-68 предусматривались автоматизация съема координат целей с выдачей трасс, пеленгация помехоносителей, защита станции от самонаводящихся снарядов противника.
Решение данных задач не подчинялось стандартным приемам и требовало применения перспективных научно-технических методов, способов, устройств и систем. В обеспечение разработки РЛС СТ-68 решением ВПК был поставлен ряд научно-исследовательских работ.
В научно-исследовательской работе "Земля" были проведены исследования путей создания перспективной трехкоординатной автоматизированной радиолокационной станции для низковысотного поля противосамолетной обороны. В работе, которая была закончена в 1968 г., были рассмотрены теоретические и экспериментальные материалы по вопросам распространения волн в приземном слое, удельных площадей рассеяния различных земных покровов, гидрометеоров и дипольных отражателей, их спектральных и поляризационных характеристик.
В ходе НИР были приведены предварительные соображения по выбору длины волны излучения и типа зондирующего сигнала. Были рассмотрены некоторые вопросы теории рассеяния радиоволн на статистически неровных поверхностях и некоторые особенности спектров отраженных сигналов при вращении антенной системы. Впервые был приведен точный расчет зон видимости радиолокационной станции на высокой опоре с учетом влияния земли.
Целью НИР "Енисей" было изыскание новых принципов построения средств обнаружения низколетящих целей в широком диапазоне скоростей с учетом уже известных. В рамках научно-исследовательской работы были проведены теоретические и экспериментальные исследования по распространению радиоволн в приземном слое, анализ типов зондирующих сигналов для выбора сигналов, обеспечивающих необходимую степень селекции подвижных целей и требуемую степень их разрешения. В 1971 г. был выпущен итоговый отчет о НИР с рекомендациями по физическим принципам построения РЛС и способов их реализации для создания маловысотного радиолокационного поля.
На основании проведенных теоретических и экспериментальных исследований в НИР "Ангара" были выданы рекомендации по построению цифровой системы селекции движущихся целей для радиолокационной станции СТ-68. Начатая в 1969 г. научно-исследовательская работа по изысканию путей дальнейшего повышения помехозащищенности РЛС обнаружения и сопровождения воздушных целей позволила определить возможности использования цифровых методов фильтрации эхо-сигналов на фоне мощных пассивных помех применительно к задачам обнаружения низколетящих целей.
В 1969 г. был выполнен аванпроект по разработке РЛС СТ-68 (индекс 5Н59), в котором рассмотрены особенности радиолокационных станций маловысотных целей, возможные варианты их построения и выработаны рекомендации по варианту станции, удовлетворяющего в максимальной степени предъявленному тактико-техническому заданию.
После успешной защиты аванпроекта постановлением ЦК КПСС и СМ СССР от 8 июня 1970 г. № 417-146 Институту была задана полномасштабная разработка передвижной трехкоординатной радиолокационной станции обнаружения и сопровождения маловысотных воздушных целей, прикрытых активными и пассивными помехами, СТ-68.
Эскизно-техническим проектом было предложено сочетание принципов активной и пассивной радиолокации, впервые анализировались излучения не только помехоносителей, но и бортовых РЛС. Работа многоканальной многофункциональной радиолокационной станции СТ-68 осуществлялась в двух существенно различных диапазонах волн.
Использование двух активных и двух пассивных каналов обеспечивало обнаружение целей по всей зоне обзора до 10° по углу места, пеленгацию поставщиков активных помех. Канал радиоразведки работал в сантиметровом диапазоне волн.

Антенно-поворотное устройство (АПУ) с 25-метровой вышкой
Фотоархив ВНИИРТ
Для селекции целей на фоне комбинированных помех использовалось сочетание антенны с электронным сканированием в двух плоскостях и когерентного накопления эхо-сигналов с режекцией отражений от различных пассивных помех. Для борьбы с помехами использовались круговая поляризация сигналов аппаратуры компенсации шумовых помех, бланкирование импульсных сигналов, приходящих по боковым лепесткам, схемы ШОУ, БАРУ и так далее.
Когерентное формирование излучаемых сигналов и обработка принимаемых сигналов позволило обеспечить подавление помехи от местных предметов до 50-60 дБ, что очень важно для РЛС малых высот.
В сантиметровом диапазоне волн была применена фазированная решетка с использованием волноводно-щелевых линеек.
В РЛС СТ-68 имелся вспомогательный канал, где использовался квазинепрерывный сигнал на более короткой волне, что позволило значительно улучшить характеристики обнаружения в зоне обзора ниже 1° по углу места и решить проблему интерференционных провалов. В станции впервые в практике радиолокации были реализованы автоматизация процессов захвата и сопровождения целей, автоматическая компенсация пассивных помех.
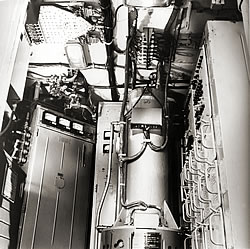
Внутренний вид прицепа П1
Фотоархив ВНИИРТ
С помощью электронно-фазового сканирования в двух плоскостях (по азимуту +30°, по углу места от 0° до 6°) в РЛС с использованием системы управления зоной обнаружения возможно "замедлять" обзор в требуемых секторах, особенно в секторах с наличием различных помех.
Аппаратура защиты от самонаводящихся снарядов позволяла осуществлять защиту станции с помощью двух отвлекающих устройств, находящихся вдали от РЛС. Можно было также осуществлять маневр каналами и режимами работы РЛС, учитывая ее многофункциональность.
Применение мобильной 25 метровой вышки позволило увеличить фазовый центр антенн, а значит, дальность обнаружения в первую очередь маловысотных целей, особенно в пересеченной и лесистой местности.
Акт комиссии по рассмотрению эскизно-технического проекта передвижной трехкоординатной радиолокационной станции обнаружения и сопровождения маловысотных воздушных целей, прикрытых активными и пассивными помехами СТ-68 был утвержден Главнокомандующим Войсками ПВО страны Маршалом Советского Союза П.Ф. Батицким 21 февраля 1973 г.

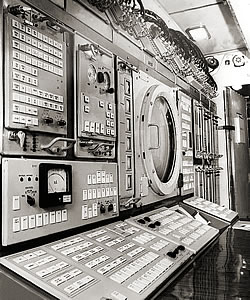
Внутренний вид прицепа П2
Фотоархив ВНИИРТ
В выводах акта отмечено: "Впервые в отечественной промышленности разработаны конкретные технические решения по конструкции и построению трехкоординатного радиолокатора для надежного обнаружения маловысотных целей на фоне отражений от земли при воздействии интенсивных помех с подъемом антенного устройства на 25-100 м", "Замена РЛС П-15 на РЛС СТ-68 в группировках войск повышает их эффективность по количеству целей, обстреливаемых ЗРВ или атакуемых истребительной авиации, не менее чем в 2,2 раза".
В ходе работы комиссии был поднят вопрос о расширении боевого применения РЛС СТ-68 путем создания упрощенного изделия на основе модульного построения (РЛС СТ-68У).
Основной проблемой подтверждения соответствия характеристик опытного образца РЛС СТ-68 требованиям тактико-технического задания явилось наличие значительного количества так называемых "ангелов" в зоне обнаружения станции. Отражения от "ангелов" наблюдались наиболее интенсивно в районах 50-100 км от РЛС, их уровень превышал полезный сигнал до 30 дБ, а скорость перемещения достигала 100-120 км/ч. Система вторичной обработки станции перегружалась точечными отметками, нарушалась нормальная работа РЛС, ухудшались точностные характеристики.
Автоматическая адаптация режимов РЛС к окружающей обстановке и применение цифрового компенсатора помех позволили успешно решить и эту проблему. Помимо борьбы с "ангелами", возникли большие трудности с отладкой программ на ЭВМ.
Не обошлось и без оргвыводов. Главный конструктор РЛС С.П. Рабинович был отстранен от разработки, и работу возглавил лично директор института П.М. Чудаков.
Дистанционный пульт управления
Фотоархив ВНИИРТ
Павел Михайлович Чудаков прошел путь от инженера до директора института (1964 г.). Участник Великой Отечественной войны (награжден орденом Отечественной войны II степени, медалями "За боевые заслуги", "За победу над Германией в Великой Отечественной войне 1941-1945 гг."). Кандидат технических наук. Имел большой опыт руководства научно-исследовательскими коллективами. Всегда был в курсе всех научно-технических вопросов.
Чудаков отдавал себе отчет в том, что будущее радиолокации заключается в автоматической обработке информации. Он создал в институте специализированное подразделение по этому направлению. Полученные результаты работы были внедрены в многофункциональную РЛС "Машук" и автоматизированную РЛС СТ-68 для обнаружения маловысотных целей.
На заключительном этапе разработки РЛС СТ-68 П.М.Чудаков стал ее главным конструктором. Он сделал все возможное для успешного окончания государственных испытаний и принятия станции на вооружение.
Испытания были завершены многоцелевой "массовкой", с применением активных и пассивных помех повышенной интенсивности. Станция вела себя отлично. Результаты превзошли все ожидания.
Завершить разработку РЛС СТ-68 поручили В.В.Копейкину. Одновременно с испытаниями была осуществлена подготовка к серийному производству РЛС СТ-68 и выпущена установочная партия станции на Муромском заводе радиоизмерительных приборов для эксплуатации в войсках.
Тактико-технические характеристики РЛС СТ-68 до настоящего времени не превзойдены ни одной из РЛС данного класса в мире. На базе РЛС СТ-68 позднее была создана и выпускалась Запорожским ПО "Искра" упрощенная модификация станции РЛС СТ-68У.
В создании РЛС активное участие приняли специалисты института: А.А. Лотков, В А. Булкин, Н. С. Вошин, Л. Н. Григорьев, Б. Д.Иванов, И. Я. Иммореев, И А. Колесник, А. Б. Колот, Е. А. Москалев, А. В. Ратнер, М. А. Спевак, В. Г. Темкин, Г. В. Яшутенков.
Авторы выражают благодарность ветерану института Нине Ивановне Томилиной за содействие в подборе архивных материалов. Фото из архива ВНИИРТ, публикуются впервые.
Опубликовано 24 января в выпуске № 1 от 2008 года
- Комментарии
- Vkontakte
- Читаемое
- Обсуждаемое
- Past:
- 3 дня
- Неделя
- Месяц
В чем вы видите основную проблему ВКО РФ?